AM5718 SoM Application in LPR Solution
With the high-speed development of technology, transportation have become more and more intelligent. LPR(Licence Plate Recognition) solution has a rapid development opportunity in automation fare collection system. Presently, mostly LPR systems are relies on PC, DSP and FPGA. To meet users' demand, Forlinx launched a new SoM named FET5718-C which could be used for advanced LPR solution to replace traditional solution.
1. About LPR
LPR is short for licence plate recognition. A complete LPR system consists of auto detection, image acquisition, licence plate recognition and other related parts. Once vehicle is recognized, image collecting unit will be triggered for video images collecting and to be processed by license plate recognition unit to get the licence plate positioned, then aplit the plate characters to identify, and at last output the complete recognized license.
Auto detection
Burying ground ring, infrared, rador, video detecting and other related solutions are all available for auto detection.
Image collecting
HD(high definition) camera
Licence plate recognition
1) licence plate positioning
2) spliting to characters on licence plate
3) characters recognition and licence number combnation
Recognition to licence color relies on algorithm, which could be done in any of the above steps, it generally coordinates with and mutual verified with licence plate recognition.
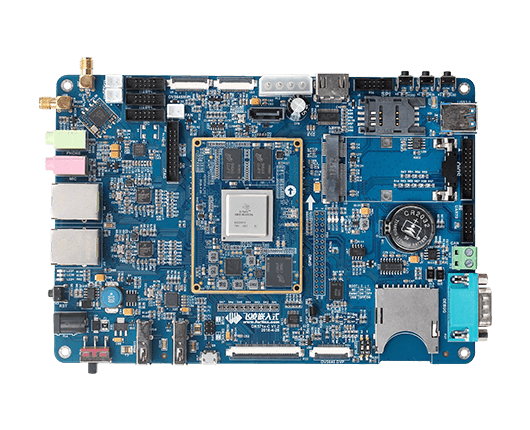
2. LPR solution based on SoM FET5718-C
The most distinguished feature by taking the FET5718-C solution is that it could take place of PC part because of its powerful computing performance. It totally could make it possible that computing done on native machine and then sending data to server. Nowadays, mostly solutions are that sending data to and processing/ computing on PC terminal, and then send the processed data to server. While, by taking the solution based on FET5718-C, it has below features.
- 1.Low cost
- 2.Small volume
- 3.Advanced reliability
- 4.Strong adaption to environment
- 5.High flexibility in management
- 6.Variable peripheral interfaces
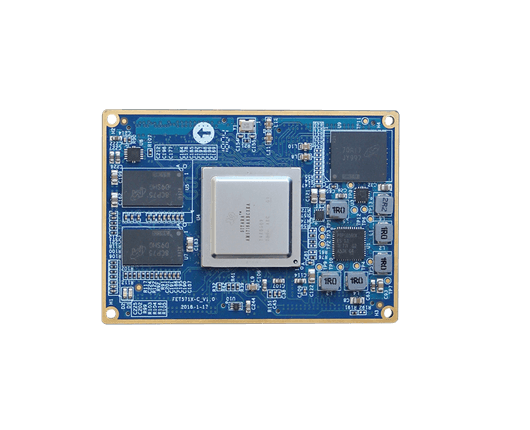
Forlinx FET5718-C SoM Spec.
- WIFI/ BT/ 4G/ Ethernet for connection to server for data transferring;
- Camera for video image collecting
- SATA for data storaging
- Audion for broadcasting
- UART for connection to barrier controlling by ground loop, infrared detecting, rador detecting, ect.
- LCD/ HDMI for displaying of car location information in parking and billing information
- GPS for positioning that once any exceptations, the related person could be informed in time for maintainance.
- The AM5718 processor can manage to do image collecting, computing and controlling tasks, It's integrated with a single-core ARM Cortex-A15 RISC CPU@ 1.5GHz, a TI C66x VLIW floating-point DSP core@ 750MHz, two dual-core PRU@ 200MHz and dual-ARM Cortex-M4 core@ 213MHz.
3. Forlinx FET5718-C SoM Features
| Overview of SoM FET5718-C | |||
| CPU | Ti Sitara AM5718 | ||
|
Architecture
|
Cortex-A15-1.5GHz | DSP-C66X-750MHz | 2x dual-core Cortex-M4-213MHz |
| 2x dual-core PRU-200MHz | PowerVR SGX544 3D GPU | Vivante GC320 2D GPU | |
| RAM | 1GB DDR3L | Flash Memory | 8GB eMMC |
| Dimensions | 50*70mm | Connection Type | board to board connectors |
| PMU | TPS659162RGZR | Voltage Input | 5V |
| Working Temp | -40℃ to +85℃ | Relative Hummidity | 10% to 90% RH none condensing |
| OS | Linux4.9.41+ QT5.6+ Wayland | ||
| SoM FET5718-C Periperals | |||
| Display interface | 3x RGB, 1x HDMI | SATA | 1x SATA |
| IIS | 8x IIS | Mini PCIe | 1x 2-lane or 2x 1-lane |
| Ethernet | 2x RGMII |
PWM |
3x PWM |
| UART | 10x UART |
EINT/ GPIO |
supported |
| CAN | 2x CAN |
Keypad |
1x keypad(8* 8) |
| IIC | 5x IIC |
QSPI |
1x QSPI |
| SPI | 4x SPI | Watchdog | CPU builtin |
| GPMC | 16-bit data bus |
eCAP |
3x eCAP |
| Camera | 4x DVP, 2x MIPI CSI |
HDQ/ 1-wire |
1x HDQ/ 1-wire |
| SD/ MMC/ SDIO | 4x SD/ MMC/ SDIO |
Timer |
16x timer |
| USB | 1x USB3.0 Host, 1x USB2.0 OTG | Temp sensor | digital temp sensor |